Some of you may have wondered why certain capacitors have polarity (meaning they have clearly defined positive and negative terminals) and others don’t. Let’s explore that today.
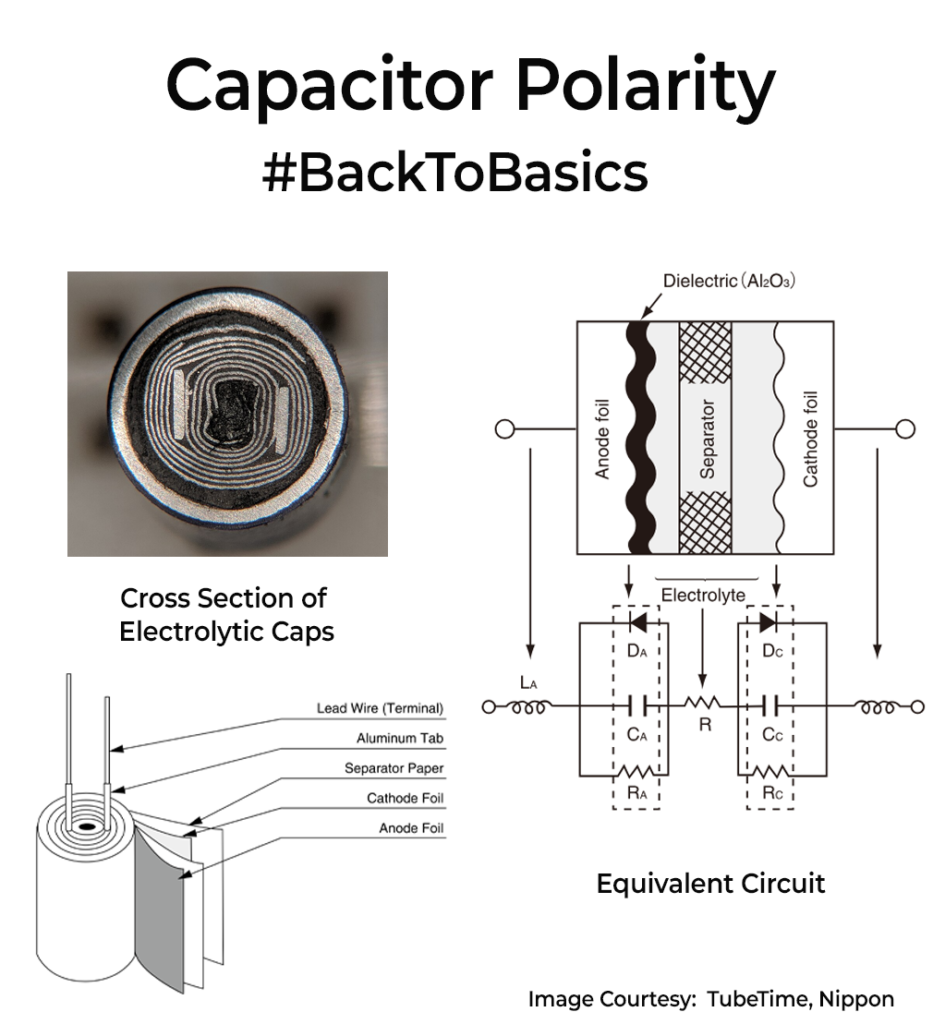
Electrolytic and tantalum capacitors are the common types that come with polarity markings. Polarity is based on of how they’re constructed internally. The electrodes are usually made of Aluminium. The positive electrode is chemically etched, and a thin oxide layer is formed on top of it that acts as a dielectric. The negative electrode is typically bare, and they have electrolyte solution in between them. When you place a capacitor with terminals swapped, it can lead to rapid breakdown of the oxide layer on the positive terminal, that causes heat generation, and even blow up. Typically, the negative terminal is clearly marked on the capacitor’s body. Don’t rely solely on the longer lead being positive; this isn’t always absolutely true. It fails anyway in surface-mount (SMD) types that lack leads entirely.
On the other hand, ceramic capacitors and film capacitors don’t have polarity markings. Their internal construction involves thin, uniform metal electrodes layered between sheets of ceramic, forming a stack that increases effective electrode area. Their symmetric design and use of inert ceramic dielectric material mean they are non-polarized and can be installed in any direction.
Sometimes, we might need to use capacitors in AC circuits, where the voltage constantly alternates polarity. In such scenarios, we typically use special non-polar electrolytic capacitors designed for AC, or connect two regular electrolytic capacitors back-to-back, which safely handles alternating polarity. You can also use ceramic capacitors, but you might not get high capacitance values in its size.
I hope this helps clarify why capacitor polarity matters. Always remember to verify the polarity markings carefully. It’s a simple practice that ensures you don’t have headaches later.